Macaw (MCAW) Tetracam's Multiple Camera Array Wireless Visión General Mejoras de equipo Mejoras de software Plano de diseño mecánico Sensores y filtros de MCAW Comparación de productos Visión general de la interfaz del navegador Pantalla de visualización en vivo Opción de cámara térmica Especificaciones del Sistema Series de seminarios en línea de Macaw |

 |
|
La serie de cámaras Tetracam MCA ha sido popular entre investigadores durante muchos años. La combinación de filtros livianos y reemplazables, además de la robustez, han llevado a ser el instrumento más citado en estudios de vegetación multiespectral. A lo largo de los años, Tetracam ha introducido mejoras en la electrónica de MCA para mantener el rendimiento competitivo y proporcionar nuevas capacidades. Consecuentemente, nos enorgullece presentar la última variación de la serie MCA: el Macaw (MCAW: Multiple Camera Array Wireless ' Sistema Inalámbrico de Cámaras Múltiples Matrizadas). Macaw llega a actualizar la electrónica de MCA obeteniendo así un sistema informático Linux con todas las funciones, con una arquitectura de código abierto y una unidad de estado sólido (SSD) SATA para misiones intensivas de computación. Mientras se toman las imágenes, Macaw puede alinear planos de imágenes y extraer índices de vegetación, como el NDVI. Puede ejecutar esto aproximadamente a la misma velocidad a la que se adquieren las imágenes, gracias a su CPU ARM de cuatro núcleos de 2 GHz. El Macaw viene equipado con dos interfaces: una interfaz de puerto serie Linux que proporciona una interfaz de control cableada y una interfaz LAN inalámbrica que proporciona servicios para una variedad de clientes utilizados por los desarrolladores: http, ssh y ftp. El Macaw viene con las herramientas de desarrollo (Eclipse) ya instaladas, y la fuente del código para la aplicación de la cámara reside en un directorio de desarrollo. Una computadora personal cercana, teléfono inteligente o tableta pueden interactuar fácilmente con la cámara a través de un punto caliente de wi-fide de la cámara. Usando los clientes Xming y PuTTY con una computadora personal presenta una interfaz gráfica de usuario (GUI)para la cámara. En el campo, el Macaw se puede controlar desde una tableta o teléfono inteligente a través de cualquier navegador de comercial de la red. Una tableta de control se incluye con el producto. Usando la interfaz del navegador, las imágenes se pueden ver y descargar, y se puede ingresar fácilmente a la documentación de ayuda. Para transferencias rápidas de datos, la SATA SSD está configurada con una interfaz de controlador USB3 externa que transfiere el disco a la Computadora Personal de escritorio, o computadora portátil, para lograr la velocidad de transferencia de USB3. La interfaz del navegador también se puede utilizar para mostrar un video en vivo desde cualquier Cámara seleccionada en la matriz. Se incluye un módulo ILS externo con un cable de 1 metro con la compra de un nuevo Macaw para así incrementar la precisión de las imágenes tomadas. Al igual que el Micro-MCA Snap, el Macaw viene con cámaras equipadas con sensores globales rápidos, diseñados específicamente para la recolección de imágenes distinguidas, de acción inmóvil desde vehículos aéreos no tripulados, volando bajo y rápido sobre bosques o tierras de cultivo. Estos sensores exponen la imagen completa al mismo instante de tiempo. Esto permite capturar imágenes libres de desenfoques a causa de movimiento y otras distorsiones. La Macaw está disponible como una serie de seis cámaras separadas. Cada cámara orientada hacia abajo en la matriz está sincronizada con precisión con las otras cámaras para que cada uno sea capaz de capturar la misma escena exactamente en el al mismo instante de tiempo. & nbsp; Cada cámara está registrada con la otras cámaras en la matriz con una precisión de sub-píxel para que todas las imágenes estén en alineación perfecta AQUÍ Cada una de las cámaras del Macaw contiene una banda estrecha especificada por el cliente y que es insertada entre el lente y el sensor. & nbsp; Con cada exposición, seis & nbsp; bandas separadas de radiación visible o de radiación tipo cerca-a-infrarrojo se mueven a través de cada lente y filtro para formar una imagen monocromática separada en cada sensor. & nbsp; Las imágenes son transferidas simultáneamente desde cada sensor. al directorio de almacenamiento de imágenes del Macaw en la unidad de almacenaje de estado sólido. El procesamiento de estas imágenes se realiza utilizando el propio Macaw. |
|
|
Esquema de composición mecánica 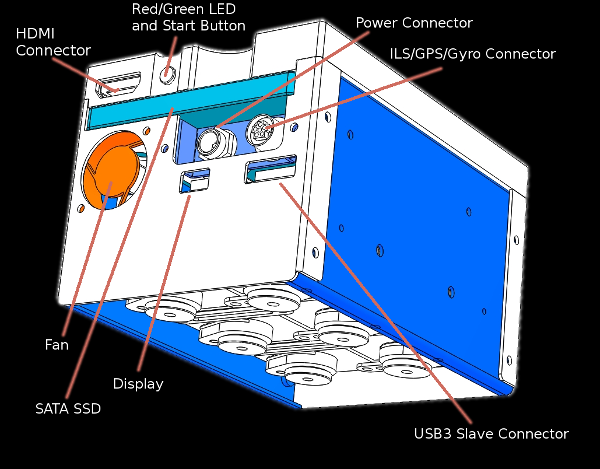 |
El MCAW tiene la misma dimensión de huella que los anteriores modelos MCA, pero los controles y conectores han sido todos agrupados en uno de los lados de la cámara, tal como ilustrado a la izquierda. Un conector HDMI se usa para conectar al sistema de vuelo, y el LED listo/ocupado es ahora parte del interruptor iniciar-parar. La electrónica del MCAW está disponible como una versión mejorada de los sistemas captadores de imágens mini-MCA y Micro-MCA que se encuentran en uso en sus aplicaciones. Están apoyados por un accesorio multifuncional ILS/GPS/Gyro que porvee metadatos para captar imágenes. La nueva unidad multifuncional ILS puede instalarse remotamente con un cable de 4 metros para asegurar una buena vista del cielo.
|
|
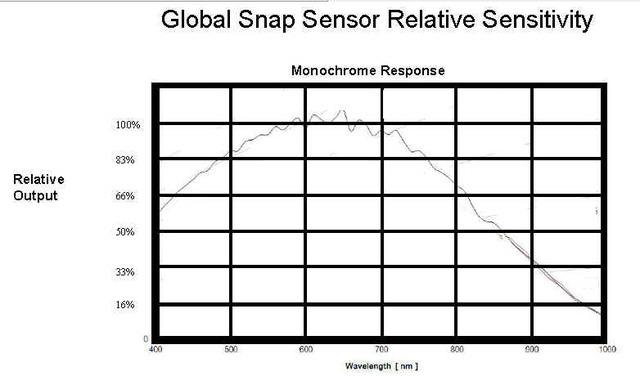
Las cámaras en el MCAW representan canales ópticos que reunen información multi-espectral a base de píxel-po-píxel para uqe luego sea procesado por el software del sistema. Cada cámara consiste de un lente, filtro, y sensor. El usuario selecciona los filtros que ha insertado entre el lente y el sensor con el fin de restringir la radiación que contacta el sensor a una banda angosta de longitudes de onda. La combinación de filtros selecionados por el usuario habilita el sistema para que reconozca una característica espectral que identifique una o más plantas, condiciones de la planta u otros compuestos . También, porque los filtros del MCAW pueden ser reemplazados por el usuario en el campo de aplicación, estos sistemas pueden ser reutilizados una y otra vez para detectar diferentes bandas de longitud a tiempos differentes para propósitos diferentes. Los sensores en el MCAW son sensores CMOS sensores de 1.3 mega-pixel. Estos producen imágenes compuestas de 1280 X 1024 pixels. Las imágenes pueden ser configuradas por medio del menú del sistema para submuestrar la imagen de tamaños más pequeños (1024 x 768 or 640 x 512) con el fin de reducir el intervalo de tiempo requerido por la cámara para capturar imágenes sucesivas. Los resultados que provee el sensor de imágenes "Global Snap" de la cámar MCAW está optimizada para recibir bandas de longitud de aproximamdamente 650 nm. Tiene una alta reacción de resultados de 400 nm en el lado bajo del espectro visible y produce una buena reacción en sector cerca del infra-rojo.at the limits of its range. Un gráfico de la sensitividad del sensor de imágenes snap está representado abajo.
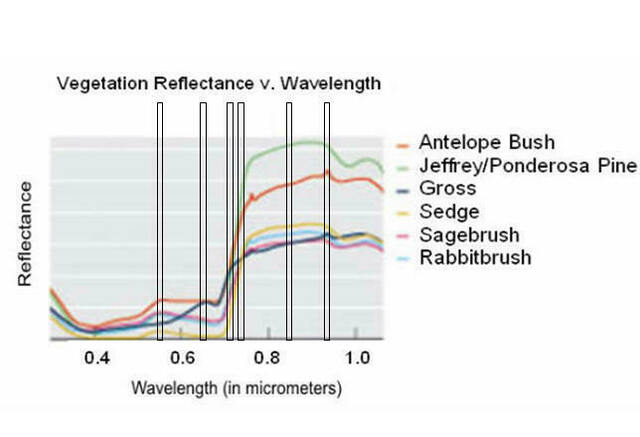
Al escoger un filtro óptico de una específica banda angosta que está dentro del rango del sensor para colocarle al frente de cada sensor de canal, la radiación que es capaz de alcanzar cada sensor puede ser restringida a una rango angosto de longitud de bandas. De esta manera, las combinaciones específicas de filtros pueden ser seleccionadas para permitir que el MCAW logre exponer una variedad de condiciones de plantas identificables for su propiedad característica única. Por ejemplo, si la reacción espectral de varias plantas son reconocidas en la región del espectro monitoreado por el MCAW, ciertos filtros pueden ser seleecionados de tal forma que ayuden a diferenciar una especie de las otras (referirse al gráfico de abajo). Esto requiere que el usuario sepa que tipo de filtros seleccionar de adelantado con el fin de exponer las difencias de interés. Nota: como un gran ejemplo de recursos de datos sobre características únicas de vegetación refiérase a "Hyperspectral Remote Sensing of Vegetation" por el autor Dr. Prasad Thenkabail, et al. disponible por medio de Tetracam. Se pueden encontrar otras referencias en nuestra página de Internet de Tetracam en nuestra base de datos Multispectral Crop and Application Database.
Alternativamente, el MCAW puede ser configurado para monitorear bandas de lonogitud de las cuales se pueden extraer índices de vegetación. Estas proveen la información necesaria para extraer los índices NDVI, SAVI y también otros índices más así como información capaz de ser deducida de éstos. Los filtros de bandas de paso proveídos con la cámara son designados por el usuario al momento de poner la orden de compra. Estos pueden ser facilmente cambiados en el campo de aplicación con el fin de reconfigurar el sistema para buscar un espectro diferente para exponer condiciones diferentes. Filtros estándares están incluídos en el precio de cada sistema. Filtros de paso de banda especiales alternativos o filtros personalizados también están dsiponibles bajo requisito del cliente, con los precios correspondientes indicados via cotización. Tenemos disponbile información adicional relativa a filtros de banda de paso. here. |
|
|
Visión General de la Interface del Navegador
|
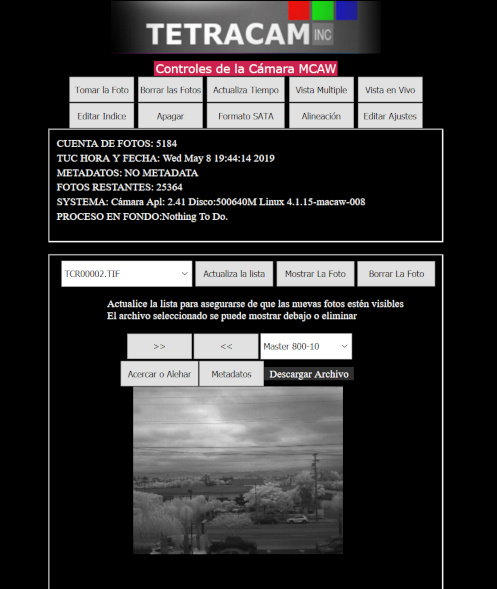
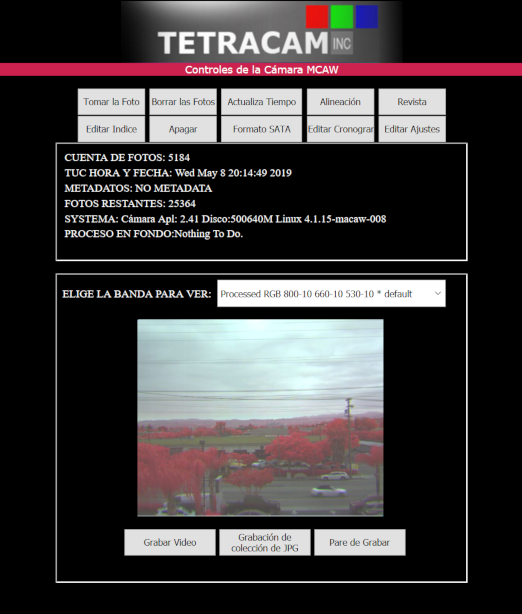
El MCAW puede ser controlado totalmente por medio de un navegador lo cual significa que puede ser una tableta, computadora de escritorio, ordenador portátil, o teléfono inteligente que pueden administrar fácilmente el MCAW,como puede verse en la imagen a la izquierda. Tomando fotos, borrando fotos, fijando fecha y tiempo, cambiando los valores del alineamiento de la matriz de la cámara, y editar ajustes, por ejemplo, todo esto se puede lograr al pulsar los botones en la página principal del interfaz. Fotos tomadas pueden ser revisadas y un canal vivo de vídeo es disponible. Fotos individuales tamién pueden ser descargadas. Cuando se revisen fotos, bandas individuales pueden ser seleccionadas para ser exhibidas desde las cámaras mmúltiples en la matriz así como varios índices, tales come NDVI. Esto se logra sin la necesidad de transferir las fotos a otro dispositivo. Si el usuario está lo suficientemente cerca a su MCAW mientras está captando fotos, así como en una nave aérea tripulada, ellos estarían habilitados a revisar las fotos mientras la misión de vuelo esté llevándose a cabo para estar seguro que todo va de acuerdo a su plan único. |
|
|
Esta página permite que el usuario pueda seleccionar una alimentación en vivo en la matriz. También permite que todas las funciones básicas de control de la cámara sean efectuadas, así como también la página de estado. El botón de "Review" (Revisar) lleva al usuario de vuelta a la página básica de estado. Existen varias opciones de vista en vivo en el menú desplegable. Las opciones consisten de vistas individuales de cada cámara en la matriz así como cualquier índice definido en indices.txt. En el ejemplo, un NIR (Cerca del Infrarojo) tradicional, rojo, verde vistos desde indices.txt han sido seleccionados. Un índice de extracción correctamente configurado en el archivo de definición de indices.txt puede ser obtenido como una vista en vivo. Los colores son determinados por la selección de paleta, donde sea aplicable. |
|
|
Lo siguiente representa las especificaines y detalles importantes de la opción de cámara térmica, lo cual consiste de un sensor Flir Tau2:
|
Especificaciones del Sistema (6 Canales)
| Fuerza | 1.75 A a 12 voltios, 9 a 15 voltios de entrada |
| Peso | 600 gramos |
| Distancia Focal del Lente | 9.6 mm fijos |
| Apertura del lente | f/3.2 |
| Temperatura | 0 grados Celsios a 40 grados Celsios (32 grados Fahrenheit to 104 grados Fahrenheit) |
| Humedad | Menos que 85% humedad relativa, no-condensable |
| Almacenamiento de Datos | Hasta 1 terabyte SATA SSD, 280GB estándar |
| Software Incluído | PixelWrench para Macaw, Icaros Grapadora de Mosaico tipo Un-botón |
| Interfás Anfitriona | Enchufe Solter USB 3.0 controlador |
| Comando / Control | Disparador de Encendedor entrada Modo Automático de Disparador y Modo de disparador GPS compensado GPS offset trigger mode (captura contínua) Comando Externo de Interfaz RS232 Línea Externa de Temporizador Para Inicio de Integración |
| Creación de Imáagenes | Seis 1280 X 1024 sensores Global Snap Shutter con acción de filtro individualbr Todos los canales escalados, traducidos, y rotados para igualar al canal maestro Pixels de alta sensitividad con 4.8 microns Ciclo de Tiempo de Captura de medio segundo Imágenes marcadas con metadatos de calibración / GPS |
![]()
Smart NDVI cameras are multispectral cameras for precision agriculture that can calculate vegetation indices and create false
color NDVI images without the use of an image processing program accessory.
Precision Farming and Forestry need multispectral camera and NDVI camera images to create orthomosaic maps
that allow interventions to be optimized. NDVI phenocameras that can perform time lapse photography are best for slow growing flora, while faster
growing commercial harvests are best served by airborne NDVI mapping cameras.